I received a question from a reader on how I would approach reading a simple gauge with one needle on a good frontal image of a circular gauge meter. This makes a good example to introduce Hough transforms. Detecting circles or lines using OpenCV and Python is conceptually simple (each particular use-case requires some parameter tuning though). Below is a simple example using the OpenCV Python interface for detecting lines, line segments and circles. The documentation for the three relevant functions are here. You can also find more on using the Python interface and the plotting commands in Chapter 10 of my book. ![]()
![]() From these features, you should be able to get an estimate on the gauge reading. If you have large images, you should probably scale them down first. If the images are noisy, you should adjust the blurring for the edge detection. There are also threshold parameters to play with, check the documentation for what they mean. Good luck.
From these features, you should be able to get an estimate on the gauge reading. If you have large images, you should probably scale them down first. If the images are noisy, you should adjust the blurring for the edge detection. There are also threshold parameters to play with, check the documentation for what they mean. Good luck.
This will in turn; read an image, create a graylevel version for the detectors, detect circles using HoughCircles(), run edge detection using Canny(), detect lines with HoughLines(), detect line segments with HoughLinesP(), draw the result (green circles, blue lines, red line segments), show the result and save an image. The result can look like this:
import numpy as np
import cv2
"""
Script using OpenCV's Hough transforms for reading images of
simple dials.
"""
# load grayscale image
im = cv2.imread("gauge1.jpg")
gray_im = cv2.cvtColor(im, cv2.COLOR_RGB2GRAY)
# create version to draw on and blurred version
draw_im = cv2.cvtColor(gray_im, cv2.COLOR_GRAY2BGR)
blur = cv2.GaussianBlur(gray_im, (0,0), 5)
m,n = gray_im.shape
# Hough transform for circles
circles = cv2.HoughCircles(gray_im, cv2.cv.CV_HOUGH_GRADIENT, 2, 10, np.array([]), 20, 60, m/10)[0]
# Hough transform for lines (regular and probabilistic)
edges = cv2.Canny(blur, 20, 60)
lines = cv2.HoughLines(edges, 2, np.pi/90, 40)[0]
plines = cv2.HoughLinesP(edges, 1, np.pi/180, 20, np.array([]), 10)[0]
# draw
for c in circles[:3]:
# green for circles (only draw the 3 strongest)
cv2.circle(draw_im, (c[0],c[1]), c[2], (0,255,0), 2)
for (rho, theta) in lines[:5]:
# blue for infinite lines (only draw the 5 strongest)
x0 = np.cos(theta)*rho
y0 = np.sin(theta)*rho
pt1 = ( int(x0 + (m+n)*(-np.sin(theta))), int(y0 + (m+n)*np.cos(theta)) )
pt2 = ( int(x0 - (m+n)*(-np.sin(theta))), int(y0 - (m+n)*np.cos(theta)) )
cv2.line(draw_im, pt1, pt2, (255,0,0), 2)
for l in plines:
# red for line segments
cv2.line(draw_im, (l[0],l[1]), (l[2],l[3]), (0,0,255), 2)
cv2.imshow("circles",draw_im)
cv2.waitKey()
# save the resulting image
cv2.imwrite("res.jpg",draw_im)
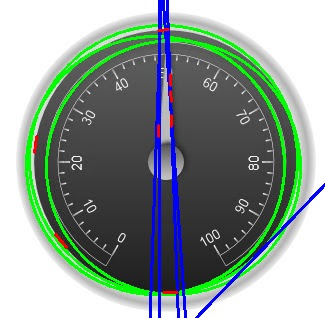
 From these features, you should be able to get an estimate on the gauge reading. If you have large images, you should probably scale them down first. If the images are noisy, you should adjust the blurring for the edge detection. There are also threshold parameters to play with, check the documentation for what they mean. Good luck.
From these features, you should be able to get an estimate on the gauge reading. If you have large images, you should probably scale them down first. If the images are noisy, you should adjust the blurring for the edge detection. There are also threshold parameters to play with, check the documentation for what they mean. Good luck.